Цена указана на условиях FOB (на складе в Китае).





Робот-растарщик колонного типа Plastron серии PCR-120-2400-LZ
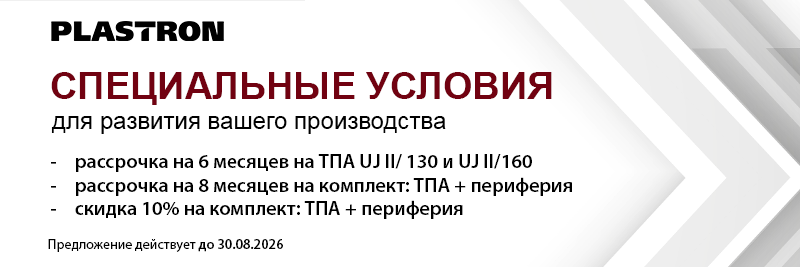
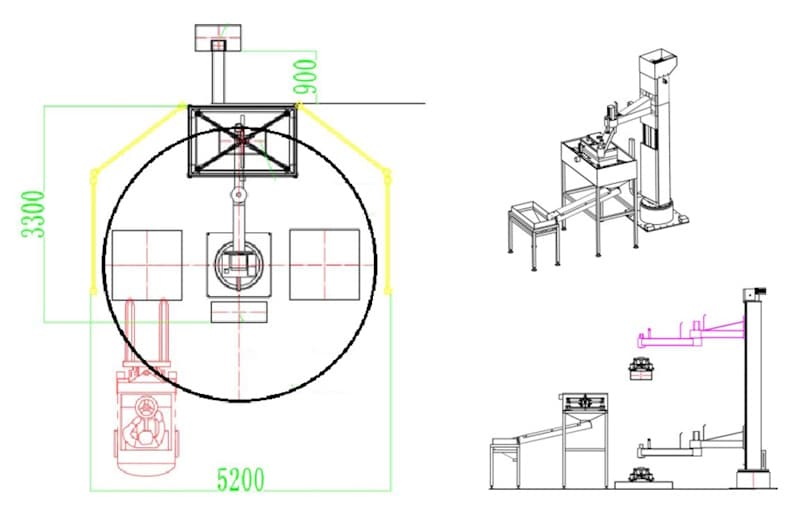
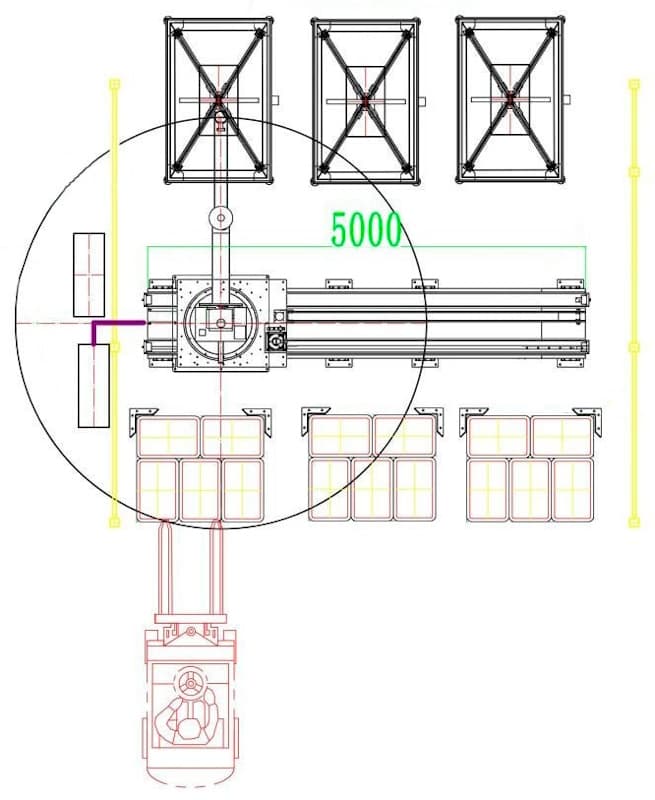
Робот-растарщик предназначен для выполнения операций укладки на поддоны, снятия грузов с поддонов, погрузочно-разгрузочных процессов и других задач на производственных линиях. Конструкция устройства включает в себя основной вращающийся опорный вал и подъемный механизм. Приводная система робота состоит из главного вала с рычажным механизмом и оси вращения захваточного устройства. Зубья захвата изготовлены из нержавеющей стали марки 304. Функция вращения позволяет одновременно выполнять укладку на поддоны, распаковку и перемещение двух поддонов с материалами. Автоматическое управление реализуется с помощью проводного обучаемого контроллера, что упрощает освоение и эксплуатацию системы. Система оснащена растарочным бункером из нержавеющей стали, ограждающей решеткой и системой 3D-зрения.
| Модель | |
| Производительность, мешков/час | |
| Максимальная нагрузка (с учетом веса захватывающего устройства), кг | |
| Рабочий радиус, мм | |
| Требуемое давление воздуха, МПа |
При смене захвата робот может выполнять функцию робота-укладчика, для штабелирования упаковки различных видов (например, мешков, коробок, вёдер, канистр и других типов упаковки) на поддон.
- Система поддерживает полностью автоматизированный цикл операций от укладки материалов на поддоны до их разгрузки и подачи, минимизируя ручной труд.
- Закрытая конструкция и система пылеудаления предотвращают контакт материалов с персоналом, обеспечивая чистые условия труда и защиту здоровья.
- Высокая производительность: 2,5-5 тонн в час (100-200 мешков в час).
- Стабильная скорость и точность работы робота минимизируют риск ошибок и повреждений, связанных с ручной обработкой.
- Колонный тип конструкции обеспечивает высокую эффективность в условиях ограниченного производственного пространства.
- Программируемый контроллер с интуитивно понятным удобным интерфейсом.
- Возможность одновременного использования на нескольких производственных линиях, быстрая перенастройка на новые продукты без модификации оборудования.

Принцип работы
Принцип работы робота-растарщика серии PCR — это четкий, отлаженный цикл из четырех основных этапов:
1. Анализ и захват. Встроенная система машинного зрения сканирует паллету, определяя точное положение даже смещенных мешков. Робот гарантированно захватывает каждый мешок, исключая пропуски.
2. Транспортировка. Закрепленный мешок весом до 50 кг перемещается в зону растаривания над приемным бункером.
3. Вскрытие и выгрузка. Острые ножи из нержавеющей стали SUS304 быстро вскрывают мешок. Мощная система встряхивания на пневмоцилиндрах обеспечивает 100% выгрузку сырья.
4. Возврат и новый цикл. Робот сбрасывает пустой мешок в накопитель и возвращается к паллете для следующего захвата.