


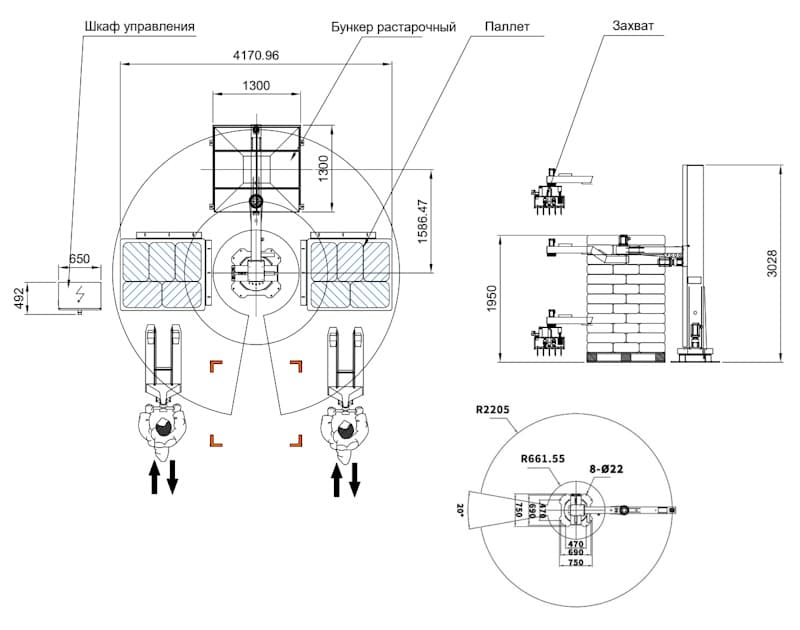
Робот-растарщик колонного типа PCR-50-2200-2150
Робот-растарщик предназначен для выполнения операций снятия мешков с поддонов для последующей резки. Конструкция устройства включает в себя основной вращающийся опорный вал и подъемный механизм. Приводная система робота состоит из главного вала с рычажным механизмом и оси вращения захваточного устройства. Управление осуществляется через промышленный контроллер с 4-осевым двигателем, обеспечивающим поворот корпуса на 340°. Функция вращения позволяет одновременно выполнять, перемещение и растаривание мешков с двух поддонов. Автоматическое управление реализуется с помощью проводного обучаемого контроллера, что упрощает освоение и эксплуатацию системы. Позиционирование для правильного захвата мешка осуществляется при помощи 3D-зрения.
| Модель | |
| Производительность, мешков/час | |
| Максимальная нагрузка (с учетом веса захвата), кг | |
| Рабочая высота, мм | |
| Рабочий радиус, мм | |
| Требуемое давление воздуха, МПа | |
| Установленная мощность, кВт | |
| Масса оборудования, кг | |
| Высота, мм |
- Система поддерживает полностью автоматизированный цикл операций по растариванию мешков, минимизируя ручной труд.
- Оборудование совместимо с мешками массой до 40 кг разных типов (полиэтилен, ткань, крафт-бумага, пластиковая пленка, композитные пакеты и др.).
- Высокая производительность: 3-5 тонн в час (120-200 мешков в час).
- Стабильная скорость и точность работы робота минимизируют риск ошибок и повреждений, связанных с ручным растариванием.
- Колонный тип конструкции обеспечивает высокую эффективность в условиях ограниченного производственного пространства.
- Робот оснащен вращающейся на 340° колонной высокопрочной механической конструкции, обеспечивающей высокую стабильность работы в условиях интенсивной эксплуатации.
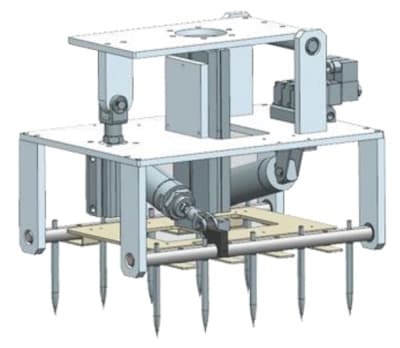
- Захват для мешков выполнен из алюминия и нержавеющей стали, оснащен пневмоцилиндрами для надёжной фиксации мешка.
- Программируемый контроллер с интуитивно понятным удобным интерфейсом.
- Возможность одновременного использования на нескольких производственных линиях, быстрая перенастройка на разные типы мешков без модификации оборудования.
Принцип работы
Робот определяет положение паллеты с мешками при помощи системы 3D-зрения. Информация о положении паллеты передается на систему управления роботом. Робот захватывает мешок и перемещает к растарочному бункеру, где мешок разрезается установленным на бункере ножом.





